Active Learning Frmework for Tactile Texture Classification
Objective
The objective of this project is to enhance robotic tactile texture recognition by implementing Active Learning (AL) strategies to minimize human labeling efforts while achieving high classification performance. The project involves developing a novel class-balancing instance selection algorithm, optimizing sliding window sizes for feature extraction, and integrating various machine learning models (e.g., Extra Trees, XGBoost) for texture classification. By evaluating the impact of AL strategies and window sizes, the goal is to improve the efficiency and accuracy of texture classification tasks in robots, particularly in environments with diverse and dynamic textures.
Description
- Conducted preprocessing and in-depth analysis of tactile sensing data collected from the exploratory movement of a robotic finger to generate meaningful features.
- Developed a hyperparameter tuning function to optimize sliding window sizes for effective feature extraction.
- Developed an Active Learning framework incorporating three strategic algorithms namely Uncertainty Sampling, Query by Committee and Expected Model Change.
- Integrated machine learning models including Random Forest, Decision Tree, XGBoost and ExtraTreesClassifier for accurate texture classification.
- Utilized statistical analysis techniques such as Wilcoxon hypothesis testing to evaluate the significance of window sizes along with the active learning strategy and machine learning models.
The developed framework for tactile texture classification
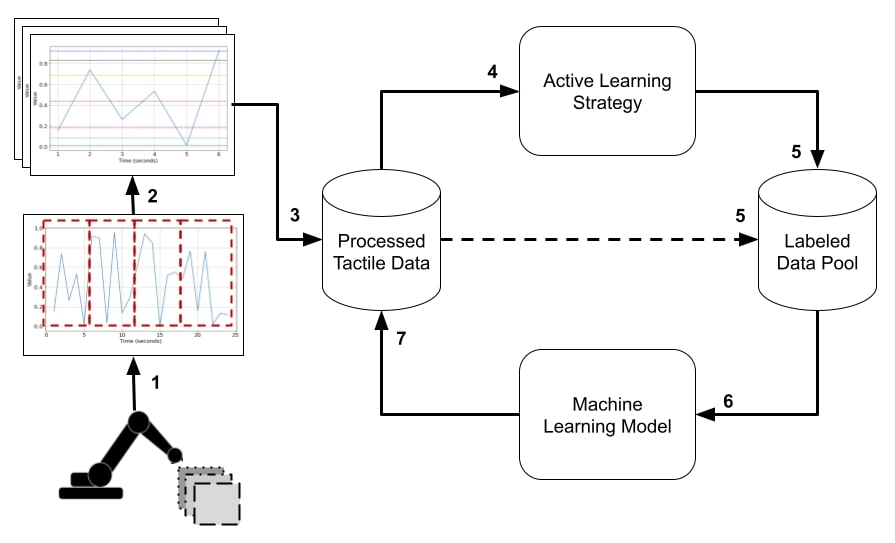
1) Data collection from exploratory movements; 2) time series data is partitioned into temporal; 3) statistical attributes extraction; 4) using AL strategies to rank instances; 5) the AL strategy selects top-ranked instances; Machine-learning model built with the instances in the labeled pool; 7) classify all instances in the processed tactile data pool
Results
- Reduced training data requirement by 70% using Active Learning (AL) strategies, with performance surpassing baseline in many cases.
- Obtained an average F1-score of 90.21% in texture classification using Extra Trees classifier.
- Demonstrated superior performance with a 6-second sliding window for feature extraction.
- Showed positive effects on performance when integrating the class-balancing instance selection algorithm with standard AL strategies.
Additional Information
The above work including the figure has been published in the Journal of Frontiers in Robotics and AI. Link